Fablab RUC
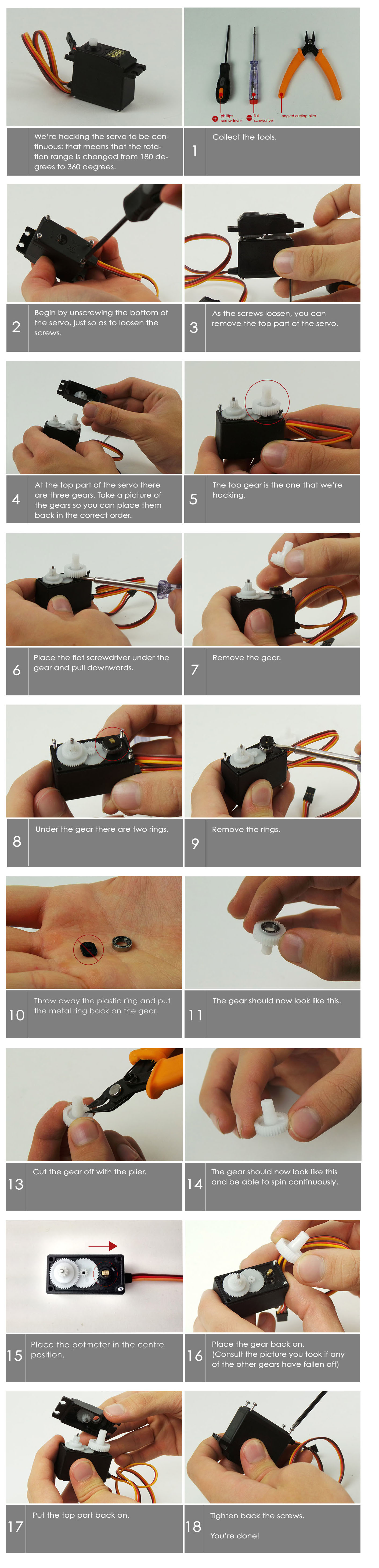
Turn a servo into a continuous servo
by
Mads Hobye
2014-12-19
View
here
.
{kind=link}